

An Arduino Uno with a LANC interface on a horrible looking shield.
I've been working from home, and I've of course been playing stuff while I work from my LaserDisc player, and 8mm Video Walkman GV-S50 playing some stuff I recorded in the 90s... MTV AMP and a few hours of a local WRUR electronica/trance show called "Digitalis".

Sony Video Walkman GV-S50
But of course, since I've got the deck right here next to me, and it doesn't have an IR receiver or any way to remote control it, I need to solve this major problem. ;D

LANC port is the 2.5mm jack on the bottom labelled "REMOTE"
The deck has a LANC connector on the back, and I happened to find a 2.5mm plug the other day, so this seemed like an obvious thing to do. Obviously.

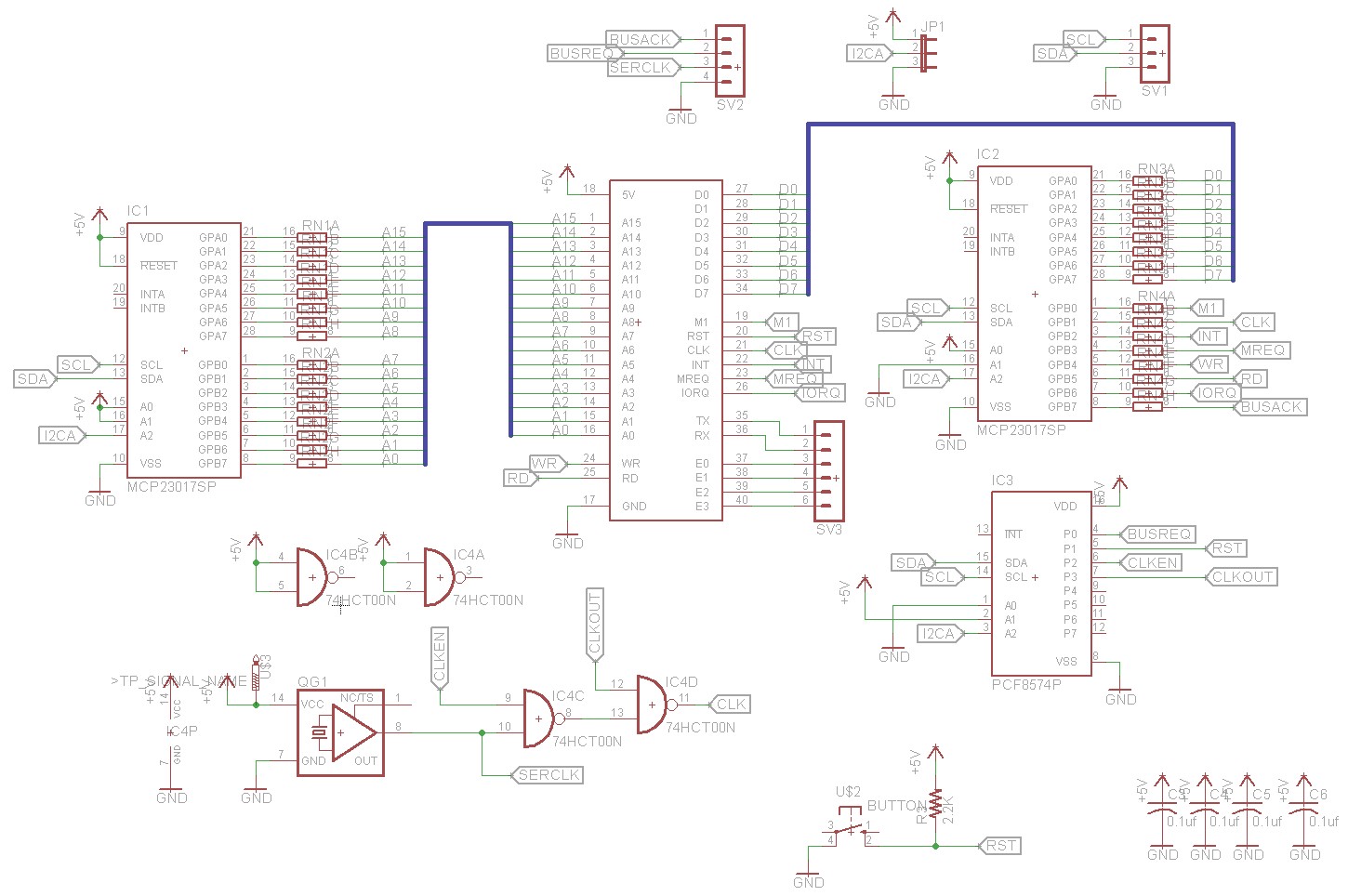
The schematic I based my circuit on. I did not include the 'push rec' button,
and I added a switch between LANC +5 and this circuit so I can decouple the power.
The transistor diagram shows the view of the transistor looking at the bottom of the device.
I found this schematic to interface to the LANC port, along with this arduino sketch that lets you just send the two byte commands out from a serial interface. Thanks to getting totally confused from the article I found, I re-read through this doc about the LANC commands and figured out that what I need to do is send the standard command byte (0x18) followed by a standard command, and the deck will do what i command it to do! So I did have it working, and better yet, the deck provides enough current to power the Arduino directly from the port.

My very slightly tweaked circuit
I made a tweak to the circuit just so that I could not worry about the 5V from my computer mingling with the 1990s 5v coming out of the VCR, so I added a switch. In the pic of the shield above, the blue pushbutton switch can be seen by the second usb port. That board has been re-used for a few projects, so there's only a couple of components on there that are actually for this one.
The only things on this board that are for this project are the blue switch in the bottom left, the transistor and zener diode in the middle and 4 of the resistors. The schematic only shows two, but I didn't have a 5.6kΩ resistor so I cobbled one together using three in series.

The docs there weren't complete for this deck (Sony Video Walkman GV-S50), and I found a few more commands (volume, megabass) so I thought I'd put the list of commands here for future reference:
Group: (0001 1000) (0x18) - Normal Command to VTR or Video Camera
- 1830 stop
- 1836 rew
- 1838 ffwd
- 1834 play
- 1832 pause (still)
- 1840 still
- 1860 frame reverse
- 1862 frame forward
- 1850 search - (scan until 'play' or 'pause')
- 1852 search + (scan until 'play' or 'pause')
- 185E power off
- 18b4 counter display/data screen
- 188c counter reset
- 18b0 tape speed (LP/SP)
- 183a rec (untested, assumed to work)
- 183c rec-pause (untested, assumed to work)
- 18d0 audio dub? (untested, might work?)
- 1876 megabass toggle *
- 1824 volume +
- 1826 volume -
- 18fc still/shuttle (still frame)
- 1846 slow
- 184c x9 speed (scan forward)
Group: (0001 1110) (0x1e) - Normal command to still video camera)
- 1e52 photo preview (scan forward)
- 1e5e power off
I tried a lot of the commands with the TV Tuner card installed, and none that I tried seemed to control it at all. (channel up/down, timer functions, menu functions). In general, none of the menu interaction commands worked at all, sadly, other that direct tape speed, counter reset, megabass mentioned above.
I eventually want to have an IR Receiver module on there, and program it to receive commands from my mega sony remote, but for now, i can type the commands out to the serial port. For example. if I type 1834[RETURN], it is the equivalent of pressing [PLAY] on the deck.
Reference Links:






























{kind=link}